
Here is a list of my publications in chronological order. You can also find me and my papers on Google Scholar. Most of them are related to my projects listed here and/or research work performed with the SpaceMaster Robotics Team, the Advanced Concepts Team or at the IDSIA Robotics Lab. A bib file with the bibtex entries for all my publications can be downloaded here.
All| Books| Book Chapters| Theses| Journal Publications| Conference Publications| Posters| Workshop Contrib.| Magazine Articles
2021 (3)
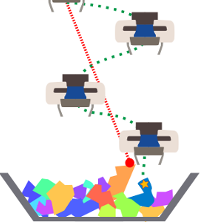
Eyes on the prize: A Perception System for Grasping Dynamic Objects.
IEEE Robotics and Automation Letters.
Passing Through Narrow Gaps with Deep Reinforcement Learning.
arXiv preprint arXiv:2103.03991
Learning Setup Policies: Reliable Transition Between Locomotion Behaviours.
arXiv preprint arXiv:2101.09391
2020 (6)
Learning Arbitrary-Goal Fabric Folding with One Hour of Real Robot Experience.
preprint arXiv:2011.00440.
Learning When to Switch: Composing Controllers to Traverse a Sequence of Terrain Artifacts.
preprint arXiv:2011.00440.
EGAD! an evolved grasping analysis dataset for diversity and reproducibility in robotic manipulation.
IEEE Robotics and Automation Letters 5 (3), 4368-4375.
Special issue on deep learning for robotic vision.
International Journal of Computer Vision 128 (5), 1160-1161.
Traversing the Reality Gap via Simulator Tuning.
preprint arXiv:2003.01369.
Designing Cartman: A Cartesian Manipulator for the Amazon Robotics Challenge 2017.
Advances on Robotic Item Picking, 125-148.
Book Webpage
2019 (10)
Evaluating task-agnostic exploration for fixed-batch learning of arbitrary future tasks.
preprint arXiv:1911.08666.
Ctrl-Z: Recovering from Instability in Reinforcement Learning.
preprint arXiv:1910.03732.
Benchmarking
Simulated Robotic Manipulation through a Real World Dataset.
Special Issue: Benchmarking Protocols for Robotic Manipulation for the IEEE Robotics and Automation Letters (RA-L), 5 (1), 250-257.
A Perceived Environment Design using a Multi-Modal Variational Autoencoder for learning Active-Sensing.
arXiv preprint arXiv:1911.00584.
Sim-to-real transfer of robot learning with variable length inputs.
Australasian Conference on Robotics and Automation 2019.
December 2019.
Learning Real-time Closed Loop Robotic Reaching from Monocular Vision by Exploiting A Control Lyapunov Function Structure.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Macau, China. November 2019.
IEEE Xplore
Robotic manipulation and the role of the task in the metric of success.
Nature Machine Intelligence, 1 (8), 340-346, August 2019.
Nature
[Reference]
[DOI]
Learning Robust, Real-time, Reactive Robotic Grasping.
International Journal of Robotics Research (IJRR), OnlineFirst, 2019.
IJRR
[DOI]
Adversarial Discriminative Sim-to-real Transfer of Visuo-motor Policies.
International Journal of Robotics Research (IJRR), OnlineFirst, 2019.
[Video]
Jointly Trained Variational Autoencoder for Multi-Modal Sensor Fusion.
(FUSION). 2019.
Multi-Modal Generative Models for Learning Epistemic Active Sensing.
International Conference on Robotics and Automation (ICRA). Montreal, Canada. May 2019.
[Poster]
 Multi-View Picking: Next-best-view Reaching for Improved Grasping in Clutter.
International Conference on Robotics and Automation (ICRA). Montreal, Canada. May 2019.
Multi-View Picking: Next-best-view Reaching for Improved Grasping in Clutter.
International Conference on Robotics and Automation (ICRA). Montreal, Canada. May 2019.
[Preprint]
[Video]
[Code]
Quantifying the Reality Gap in Robotic Manipulation Tasks.
International Conference on Robotics and Automation (ICRA). Montreal, Canada. May 2019.
[Preprint]
Multisensory Assisted In-hand Manipulation of Objects with a Dexterous Hand.
ICRA2019ViTac (Workshop at ICRA). Montreal, Canada. May 2019.
Picking the right robotics challenge.
Nature Machine Intelligence, 1 (3), 162, 2019.
Nature
[preprint]
[Reference]
[DOI]
2018 (10)
Zero-shot Sim-to-Real Transfer with Modular Priors.
Design of a Multi-Modal End-Effector and Grasping System: How Integrated Design helped win the Amazon Robotics Challenge.
Australasian Conference on Robotics and Automation (ACRA). Lincoln, New Zealand. December 2018.
Guest Editorial: Open Discussion of Robot Grasping Benchmarks, Protocols and Metrics.
IEEE Transactions on Automation Science and Engineering, Vol: 15, Issue: 4, Oct 2018.
IEEE Xplore
Towards vision-based manipulation of plastic materials.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Madrid, Spain. October 2018.
[Preprint]
 Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach.
Robotics: Science and Systems(R:SS). Pittsburgh, USA. June 2018.
Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach.
Robotics: Science and Systems(R:SS). Pittsburgh, USA. June 2018.
[Preprint]
[Video]
[Code]
[Poster]
[Press]
[Press]
[Kinova Case Study]
Training Deep Neural Networks for Visual Servoing.
International Conference on Robotics and Automation (ICRA). Brisbane, Australia. May 2018.
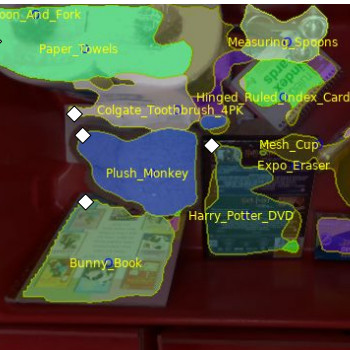 Semantic Segmentation from Limited Training Data.
International Conference on Robotics and Automation (ICRA). Brisbane, Australia. May 2018.
Semantic Segmentation from Limited Training Data.
International Conference on Robotics and Automation (ICRA). Brisbane, Australia. May 2018.
 Cartman: The low-cost Cartesian Manipulator that won the Amazon Robotics Challenge.
International Conference on Robotics and Automation (ICRA). Brisbane, Australia. May 2018.
Cartman: The low-cost Cartesian Manipulator that won the Amazon Robotics Challenge.
International Conference on Robotics and Automation (ICRA). Brisbane, Australia. May 2018.
Webpage: http://Juxi.net/projects/AmazonRoboticsChallenge/
Finalist Amazon Best Systems Paper Award
[Preprint]
[Poster]
[Video 2min]
[Video of Final Run during the Challenge, 26min]
The Limits and Potentials of Deep Learning for Robotics.
International Journal of Robotics Research (IJRR) Vol 37, Issue 4-5, 2018.
IJRR
[Preprint]
[DOI]
[BibTeX Reference]
IJRR: Special Issue on Deep Learning in Robotics.
International Journal of Robotics Research (IJRR) Vol 37, Issue 4-5, 2018.
2017 (13)
Design of a Multi-Modal End-Effector and Grasping System: How Integrated Design helped win the Amazon Robotics Challenge.
(ACRV Tech. Report 2017-03)
Mechanical Design of a Cartesian Manipulator for Warehouse Pick and Place.
(Tech. Report on arXiv)
Modular Deep Q Networks for Sim-to-real Transfer of Visuo-motor Policies.
Australasian Conference on Robotics and Automation (ACRA). Sydney. December 2017.
Finalist Best Paper
[Preprint]
[Video]
Sim-to-real Transfer of Visuo-motor Policies for Reaching in Clutter: Domain Randomization and Adaptation with Modular Networks.
(arXiv preprint)
Generative Perception for Robotic Grasping.
"Towards robust grasping and manipulation skills for humanoids" Workshop at the IEEE RAS International Conference on Humanoid Robots. Birmingham, UK. July 2017.
[Abstract]
[Poster]
Hierarchical Grasp Detection for Visually Challenging Environments.
"Towards robust grasping and manipulation skills for humanoids" Workshop at the IEEE RAS International Conference on Humanoid Robots. Birmingham, UK. July 2017.
[Abstract]
[Poster]
LunaRoo, jumping to new heights.
International Astronautical Congress (IAC) / Space Exploration Symposium. Adelaide. September 2017.
Abstract
Exciting Students for Systems Programming Through the Use of Mobile Robots.
Tech Report. University of Bremen.
[preprint]
Richardson-Lucy Deblurring for Moving Light Field Cameras.
Lightfields for Computer Vision Workshop at the Computer Vision and Pattern Recognition (CVPR) conference. Honolulu, USA. July 2017.
[Preprint]
Tuning Modular Networks with Weighted Losses for Hand-Eye Coordination.
"Deep Learning for Robotic Vision" Workshop at the Computer Vision and Pattern Recognition (CVPR) conference. Honolulu, USA. July 2017.
[Preprint]
What Would You Do? Acting by Learning to Predict.
"Learning from Demonstration in High Dimensional Feature Spaces" Workshop at the Robotics: Systems and Science (RSS) conference. Boston, USA. July 2017.
[Preprint]
[Video]
Visual Servoing from Deep Neural Networks.
"New Frontiers in Deep Learning for Robotics" Workshop at the Robotics: Systems and Science (RSS) conference. Boston, USA. July 2017.
[Preprint]
The ACRV Picking Benchmark: A Robotic Shelf Picking Benchmark to Foster Reproducible Research.
International Conference on Robotics and Automation (ICRA). Singapore. May 2017.
Webpage: http://Juxi.net/dataset/apb/
[BibTeX Reference]
[Preprint]
2016 (6)
A Robustness Analysis of Deep Q Networks.
Australian Conference on Robotics and Automation (ACRA). Brisbane, Australia. December 2016.
[BibTeX Reference]
[ARAA Paper Download]
Designing a Robotic Hopping Cube for Lunar Exploration.
Australian Conference on Robotics and Automation (ACRA). Brisbane, Australia. December 2016.
[BibTeX Reference]
[ARAA Paper Download]
A Modular Software Framework for Eye-hand Coordination in Humanoid Robots.
Frontiers in Robotics and AI, Vol. 3, Number 26, 2016.
[BibTeX Reference]
DOI
Frontiers
Interactive Computational Imaging for Deformable Object Analysis.
International Conference on Robotics and Automation (ICRA). Stockholm, Sweden. May 2016.
[BibTeX Reference]
[Interactive Poster]
A Distributed Robotic Vision Service.
International Conference on Robotics and Automation (ICRA). Stockholm, Sweden. May 2016.
[BibTeX Reference]
LunaRoo: Designing a Hopping Lunar Science Payload.
IEEE Aerospace Conference. Big Sky, MT, USA. March 2016.
[BibTeX Reference]
2015 (5)
Towards Vision-Based Deep Reinforcement Learning for Robotic Motion Control.
Australian Conference on Robotics and Automation (ACRA). Canberra, Australia. December 2015.
[BibTeX Reference]
A Bottom-Up Integration of Vision and Actions To Create Cognitive Humanoids.
in Cognitive Robotics, edited by Hooman Samani.
pp 191-214. ISBN: 978-1482244564. CRC Press, Francis and Taylor, 2015.
[BibTeX Reference]
DOI
CRC Press
The Need for Dynamic & Active Datasets.
"The Future of Datasets in Vision" Workshop at the Computer Vision and Pattern Recognition (CVPR) conference. Boston, USA. June 2015.
[BibTeX Reference]
[Poster]
[Spotlight Slide]
![[Poster]](/papers/ws/dynamic-active-datasets-poster-downsampled.png){kind=link}
Extending Visual Perception With Haptic Exploration for Improved Scene Understanding.
"SUNw: Scene Understanding Workshop (SUNw)" at the Vision and Pattern Recognition (CVPR) conference.
Boston, USA. June 2015.
[BibTeX Reference]
[Poster]
![[Poster]](/papers/ws/HapticEx-Poster-Downsampled.png){kind=link}
LunaRoo: A Proposal for the Google Lunar XPrize Payload Opportunity with the Part Time Scientists team.
QUT ePrints Tech Report. Apr 2015.
2014 (4)
Reactive Reaching and Grasping on a Humanoid: Towards Closing the Action-Perception Loop on the iCub.
International Conference on Informatics in Control, Automation and Robotics (ICINCO).
Vienna, Austria. September 2014.
[BibTeX Reference]
IEEE Xplore
Improving Robot Vision Models for Object Detection Through Interaction.
World Congress on Computational Intelligence 2014 -- International Joint Conference on Neural Networks (IJCNN).
[BibTeX Reference]
IEEE Xplore
Teleoperation of a 7 DOF Humanoid Robot Arm Using Human Arm Accelerations and EMG Signals.
International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS) 2014
[BibTeX Reference]
Slides
Curiosity driven reinforcement learning for motion planning on humanoids.
Frontiers in Neurorobotics, 7:25, 2014.
[BibTex Reference]
DOI
Frontiers
2013 (6)
Task-Relevant Roadmaps: A Framework for Humanoid Motion Planning.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Tokyo, Japan. November 2013.
[BibTeX Reference]
DOI
IEEE Xplore
ALife in Humanoids: Developing a Framework to Employ Artificial Life Techniques for High-Level Perception and Cognition Tasks on Humanoid Robots.
"Artificial Life Based Models of Higher Cognition" Workshop at the European Conference on Artificial Life (ECAL).
Taormina, Italy. September 2013.
[BibTeX Reference]
Slides
Artificial Neural Networks For Spatial Perception: Towards Visual Object Localisation in Humanoid Robots.
International Joint Conference on Neural Networks (IJCNN).
Dallas, USA. August 2013.
[BibTeX Reference]
DOI
IEEE Xplore
Slides
Learning Visual Object Detection and Localisation Using icVision.
Biologically Inspired Cognitive Architectures, Vol. 5, 2013.
[BibTeX Reference]
DOI
Elsevier
Humanoid Learns to Detect Its Own Hands.
IEEE Congress on Evolutionary Computing (CEC).
Cancun, Mexico. June 2013.
[BibTeX Reference]
DOI
Slides
Cartesian Genetic Programming for Image Processing (CGP-IP).
In Genetic Programming Theory and Practice X, Genetic and Evolutionary Computation.
pp 31-44. ISBN: 978-1-4614-6845-5. Springer, Ann Arbor, 2013.
[BibTeX Reference]
DOI
Springer
2012 (10)
Cartesian Genetic Programming for Image Processing and Robot Vision.
IEEE Robotics & Automation Society Summer School on "Robot Vision and Applications".
Santiago, Chile. December 2012.
extended abstract
webpage
Learning Spatial Object Localization from Vision on a Humanoid Robot.
International Journal of Advanced Robotic Systems (ARS), Vol. 9, 2012.
[BibTeX Reference]
DOI
InTech
Autonomous Learning Of Robust Visual Object Detection And Identification On A Humanoid.
IEEE Conference on Development and Learning (ICDL) and Epigenetic Robotics (EpiRob).
San Diego, USA. November 2012.
Paper of Excellence Award
[BibTeX Reference]
DOI
IEEE Xplore
Slides
An Integrated, Modular Framework for Computer Vision and Cognitive Robotics Research (icVision).
In Biologically Inspired Cognitive Architectures 2012: A Chella, et. al (eds.)
Advances in Intelligent Systems and Computing (Vol. 196), pp. 205-210. Springer Berlin Heidelberg, 2013.
(presented at the Int'l Conference on Biologically Inspired Cognitive Architectures (BICA). Palermo, Italy. November 2012.)
[BibTeX Reference]
DOI
SpringerLink
Transferring Spatial Perception Between Robots Operating In A Shared Workspace.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Vilamoura, Portugal. October 2012.
[BibTeX Reference]
DOI
IEEE Xplore
Slides
Towards Spatial Perception: Learning to Locate Objects From Vision.
Postgraduate Conference on Robotics and Development of Cognition (RobotDoC-PhD).
Lausanne, Switzerland. September 2012.
[BibTeX Reference]
DOI
Slides
Mars Terrain Image Classification using Cartesian Genetic Programming.
11th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS).
Torino, Italy. September 2012.
[BibTex Reference]
Slides
The Modular Behavioral Environment for Humanoids & other Robots (MoBeE).
9th International Conference on Informatics in Control, Automation and Robotics (ICINCO).
Rome, Italy. July 2012.
[BibTeX Reference]
MT-CGP: Mixed Type Cartesian Genetic Programming.
Genetic and Evolutionary Computation Conference (GECCO).
Philadelphia, USA. July 2012.
[BibTeX Reference]
DOI
icVision: A Modular Vision System for Cognitive Robotics Research.
5th International Conference on Cognitive Systems (CogSys).
Vienna, Austria. February 2012.
[BibTeX Reference]
2011 (2)
Artificial Curiosity for Autonomous Space Exploration.
Acta Futura, 4, pp. 41-52, 2011.
[BibTeX Reference]
DOI
CUDA Massively Parallel Trajectory Evolution.
GPUs for Genetic and Evolutionary Computation Competition (GPGPU) at the Genetic and Evolutionary Computation Conference (GECCO).
Dublin, Ireland. July 2011.
project webpage
2010 (3)
Evolving ANNs for Spacecraft Rendezvous and Docking.
10th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS).
Sapporo, Japan. August 2010.
[BibTeX Reference]
On Cooperation in a Multi Robot Society for Space Exploration.
10th International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS).
Sapporo, Japan. August 2010.
[BibTeX Reference]
Simulating Resource Sharing In Spacecraft Clusters Using Multi-Agent-Systems.
Small Satellites Systems and Services - The 4S Symposium 2010.
Funchal, Madeira. June 2010.
[BibTeX Reference]
2009 (5)
Robot Formations for Area Coverage.
Second International Conference on Intelligent Robotics and Applications (ICIRA).
Singapore. December 2009.
[BibTeX Reference]
SpringerLink
Multi-Robot Cooperation in Space: A Survey.
Advanced Technologies for Enhanced Quality of Life (AT-EQUAL), pp. 144-151.
2009.
(presented at the 2nd ECSIS Symposium on Learning and Adaptive Behavior in Robotic Systems (LAB-RS), Iaşi, Romania.)
[BibTeX Reference]
DOI
Project SMURFS - A Society of Multiple Robots.
Mobile Robots Workshop.
AAAI/International Joint Conference on Artificial Intelligence (IJCAI).
Pasadena, USA. July 2009.
PubInfo
A Survey of Multi-Robot Cooperation in Space.
Automation, Robotics and Control Systems (ARCS-09) Conference.
Orlando, USA. July 2009.
PubInfo
© ISRST
The REEL-E Project (HALE launch campaign) - Results and Lessons Learned.
Austrian Space Applications Program.
Wien, Austria. June 2009.
2008 (2)
A Benchmark on Stereo Disparity Estimation for Humanoid Robots.
8th Conference on Autonomous Robot Systems and Competitions (Robotica).
Aveiro, Portugal. April 2008.
[BibTeX Reference]
Universal Robot-Human-Operations Cooperative Unit.
Student Design Competition. 3rd Annual Human Robot Interaction Conference.
Amsterdam, The Netherlands. March 2008.
project webpage
PhD Dissertation and related documents (3)
From Vision to Actions:
Towards Adaptive and Autonomous Humanoid Robots. (v2)
PhD Dissertation. Università della Svizzera Italiana (USI).
Lugano, Switzerland. September 2014. (v2: Feb 2015)
From Vision to Actions: Towards Adaptive and Autonomous Robots.
PhD Research Proposal. Università della Svizzera Italiana (USI). Lugano, Switzerland. November 2013.
Towards Adaptive and Autonomous Robots: Developing Visually Guided Object Manipulation on the iCub Humanoid.
PhD Research Prospectus. Università della Svizzera Italiana (USI). Lugano, Switzerland. June 2012.
Theses (3)
Multi-Robot Formations for Area Coverage in Space Application.
MSc Thesis. Helsinki University of Technology (TKK).
Espoo, Finland. August 2009.
PubInfo
Processing - The New Way of Visual Programming. BSc Thesis. DECO research group, Vienna University of Technology. Vienna, Austria. 2007.
Java Security Concepts Within 'Insecure Networks'. Diploma Thesis. Vocational High-School, Dept. of Computer Science. HTBLuVA St. Pölten, Abt. EDVO. St. Pölten, Austria. 2003.
Student Theses/Reports
Learning Real-world Visuo-motor Policies from Simulation.
PhD thesis QUT.
Brisbane, Australia. 2018.
Understanding GGP-IP.
Final Year Thesis QUT.
Brisbane, Australia. Nov 2015.
Controlling Robots Using Vision and Bio Sensors.
Vacation Research Experience Scheme (VRES) QUT.
Brisbane, Australia. Feb 2015.
together with Sareh Shirazi, Ben Upcroft
Monocular camera based real-time on-board obstacle avoidance for unmanned aerial vehicles.
Master of Science Thesis USI.
Lugano, Switzerland. Sep 2014.
together with Alexander Förster
Drone Piloting Study.
Bachelor of Science Thesis USI.
Lugano, Switzerland. Jun 2014.
together with Alexander Förster